STMicroelectronics VL53L5CX Sensorê Demjimêra Rêjeya Rêjeya Firînê ya Multizone

Pêşkêş
Armanca vê manuala bikarhêner ev e ku meriv rave bike ka meriv çawa senzora Wext-of-Flight (ToF) ya VL53L5CX, bi karanîna ajokera ultra lite (ULD) API-ê ve mijûl dike. Ew fonksiyonên sereke yên bernameya amûrê, kalibrasyon, û encamên derketinê diyar dike.
VL53L5CX rewşek hunerî ye, ToF, senzorek pirzimanî ye ku malbata hilberê STMicroelectronics Flight Sense zêde dike. Ew di pakêtek veguhezbar a miniature de cîh digire, ew rêzek SPAD, fîlterên infrasor ên laşî, û hêmanên optîkî yên difraktîf (DOE) vedihewîne da ku di şert û mercên cihêreng ên ronahiya hawîrdorê de bi cûrbecûr materyalên cama sergirtî re performansa herî baş bi dest bixe.
Pîvandinên dûrahiya pirzone heya 8 × 8 deveran bi qadeke dîagonal a fireh a 63 ° mimkun e. view (FoV) ku dikare bibe
ji hêla nermalavê ve kêm kirin. Her herêmek VL53L5CX dûrahiya armancê heya 4 metreyan, bi frekansa herî zêde 60 Hz dipîve.
Bi saya algorîtmayên histogram ên patentkirî yên STMicroelectronics, VL53L5CX dikare tiştên cihêreng di hundurê FoV de kifş bike.
Histogram di heman demê de ji bo vegirtina xaçerêya şûşê ya ji 60 cm wêdetir bêparêziyê peyda dike.

Çavkanî
Daneya rûpelê VL53L5CX (DS13754).
Akronîm û kurtenivîs
| Akronîm/kurtenivîs | Binavî |
| DOE | hêmana optîkî ya difraktîf |
| FoV | qada ji view |
| I²C | circuit inter-entegre (otobusa serial) |
| Kcps/SPAD | Kîlo-hejmar per saniyeyê ji bo her spad (yekîneya ku ji bo hejmartina hejmara fotonan di nav rêza SPAD de tê bikar anîn) |
| BERAN | bîra random-gihîştina |
| SCL | rêza demjimêra serial |
| SDA | daneyên serial |
| SPAD | yek foton avalanche diode |
| ToF | Time-of-Flight |
| ULD | ajokerê ultra lite |
| VCSEL | diodê derdixe ser rûyê valahiya vertical |
| VHV | vol pir bilindtage |
| Xtalk | crosstalk |
Danasîna fonksiyonel
Pergal qediyaview
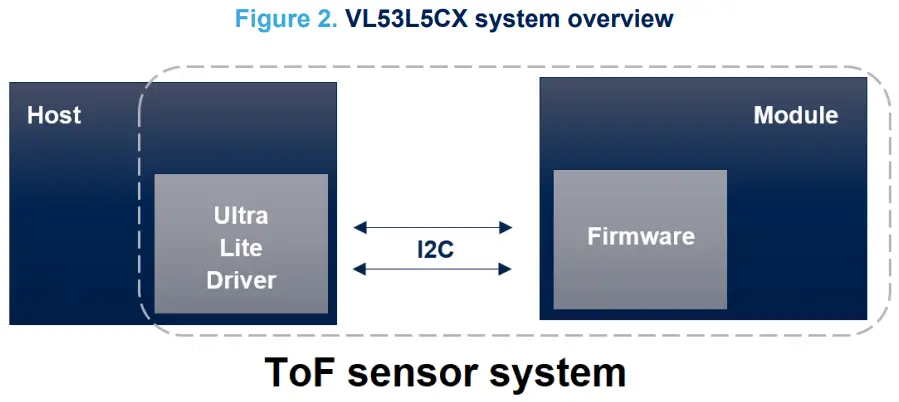
Pergala VL53L5CX ji modulek hardware û nermalava ajokerê ultra lite (VL53L5CX ULD) ku li ser mêvandarek dixebite pêk tê (li jimareya jêrîn binêre). Modula hardware senora ToF vedihewîne. STMicroelectronics ajokera nermalavê, ku di vê belgeyê de wekî "şofêr" tê binav kirin, peyda dike. Ev belge fonksiyonên ajokerê, ku ji mêvandar re têne gihîştin diyar dike. Van fonksiyonan senzorê kontrol dikin û daneya rêzê digirin.
orientation bi bandor
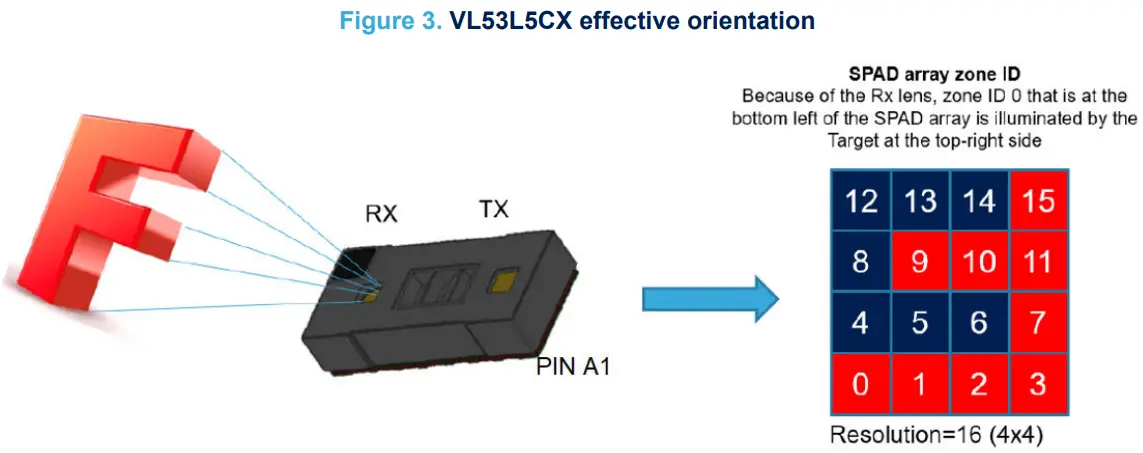
Modul lensek li ser dirûvê Rx vedihewîne, ku wêneya hatî girtinê ya armancê dihejîne (herîzontal û vertîkal). Ji ber vê yekê, devera ku wekî qada 0 tête nas kirin, di binê çepê ya rêza SPAD-ê de, ji hêla armancek li milê rastê yê jorîn ê dîmenê ve tê ronî kirin.
Schematics û veavakirina I²C
Têkiliya di navbera ajokar û firmware de ji hêla I²C ve tê rêve kirin, bi kapasîteya xebitandinê heya 1 MHz. Bicîhkirinê li ser xetên SCL û SDA vekêşan hewce dike. Ji bo bêtir agahdarî serî li danezana VL53L5CX bidin.
Amûra VL53L5CX navnîşek I²C ya xwerû ya 0x52 heye. Lêbelê, gengaz e ku meriv navnîşana xwerû biguhezîne da ku ji pevçûnên bi cîhazên din re dûr bikevin, an jî ji bo pergalek mezintir FoV zêdekirina gelek modulên VL53L5CX li pergalê hêsan bikin. Navnîşana I²C dikare bi karanîna fonksiyona vl53l5cx_set_i2c_address() were guheztin.
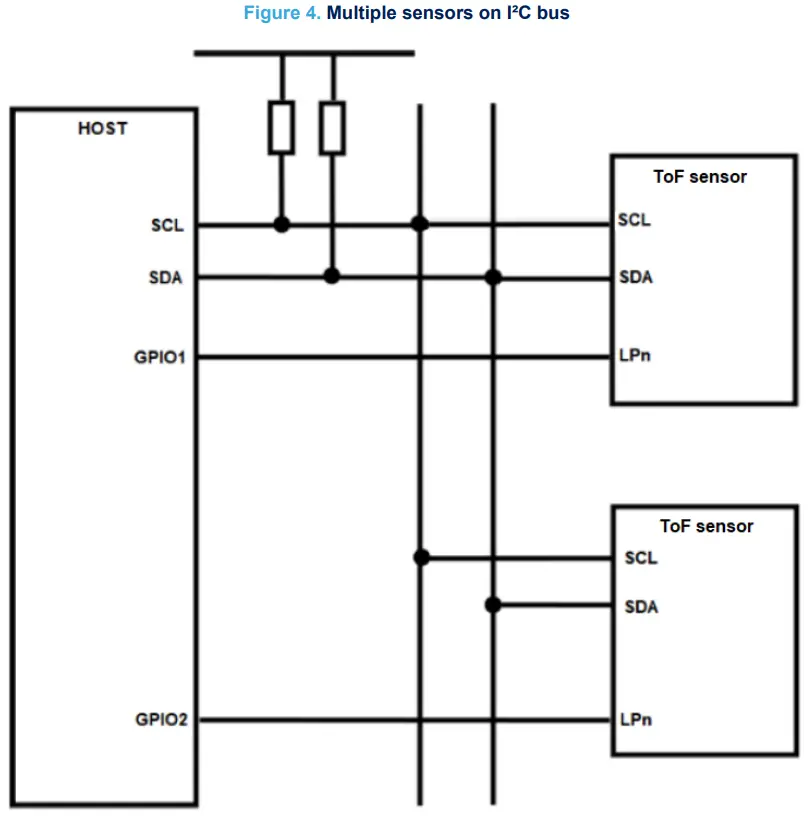
Ji bo ku rê bidin amûrek ku navnîşana I²C-ya wê bê guheztin bêyî ku bandorê li kesên din ên li ser otobusa I²C bike, girîng e ku pêwendiya I²C ya cîhazên ku nayên guhertin neçalak bikin. Pêvajoyek jêrîn e:
- Pergalê wekî normal hêz bikin.
- Pîneya LPn ya cîhaza ku dê navnîşana wê neyê guheztin dakêşin.
- Pîneya LPn ya cîhaza ku navnîşana I²C guherî ye, bikişîne.
- Navnîşana I²C-ê bi karûbarê set_i2c_address()-ê li cîhazê bername bike.
- Pîneya LPn ya cîhaza ku ji nû ve nayê bernamekirin bikişîne.
Divê êdî hemî cîhaz li ser otobusa I²C peyda bibin. Ji bo hemî cîhazên VL53L5CX yên di pergalê de ku navnîşek I²C ya nû hewce dike gavên jorîn dubare bikin.
Naveroka pakêtê û herikîna daneyê
Mîmariya ajokar û naverok
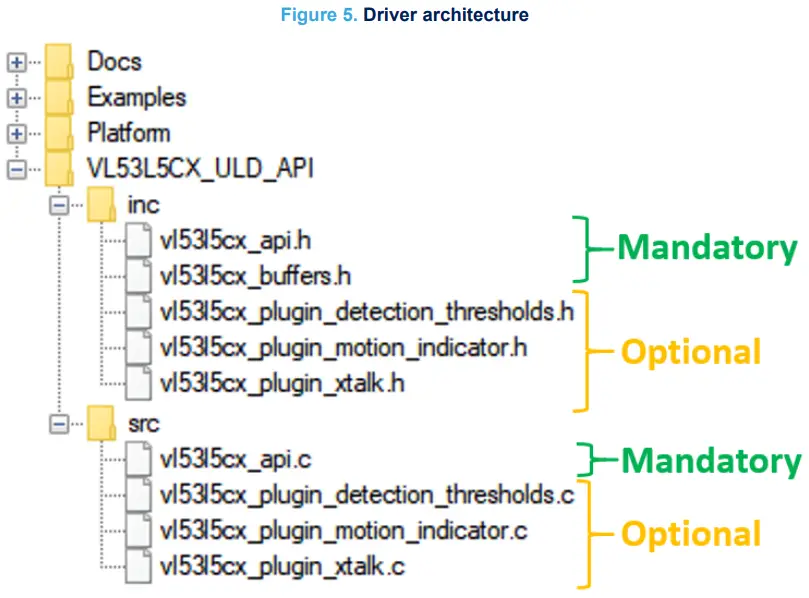
Pakêta VL53L5CX ULD ji çar peldankan pêk tê. Ajokar di peldankê de ye / VL53L5CX_ULD_API.
Ajokar ji mecbûrî û vebijarkî pêk tê files. Bixwe files in plugins ji bo dirêjkirina taybetmendiyên ULD tê bikar anîn.
Her pêvek bi peyva "vl53l5cx_plugin" dest pê dike (mînak vl53l5cx_plugin_xtalk.h). Ger bikarhêner pêşniyarê naxwaze plugins, ew dikarin bêyî ku bandorê li taybetmendiyên ajokerên din bikin werin rakirin. Nîgara jêrîn ya mecbûrî nîşan dide files û vebijarkî plugins.
Bikarhêner jî pêdivî ye ku du bicîh bike files di peldanka /Platformê de cih digire. Platforma pêşniyarkirî şêlek vala ye, û divê bi fonksiyonên veqetandî were dagirtin.
Not: Platform.h file makroyên mecbûrî hene ku ULD bikar bînin. Hemî file naverok mecbûrî ye ku meriv ULD-ê rast bikar bîne.
herikîna calibration
Crosstalk (Xtalk) wekî mîqdara sînyala ku li ser rêza SPAD hatî wergirtin tê pênase kirin, ku ji ber ronîkirina ronahiya VCSEL di hundurê pencereya parastinê (şûşeya sergirtî) de ye ku li ser modulê hatî zêdekirin. Modula VL53L5CX bixwe tê kalîbrkirin, û dikare bêyî kalibrasyonek zêde were bikar anîn.
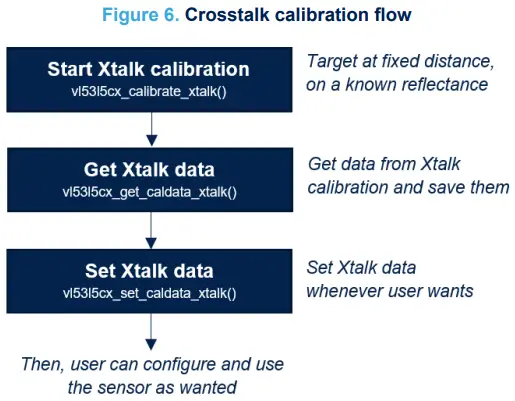
Ger modul bi şûşek sergirtî were parastin dibe ku kalibrasyona Crosstalk hewce be. VL53L5CX bi saya algorîtmaya histogramê ji 60 cm zêdetir ji axaftinê bêpar e. Lêbelê, li dûrên kurt ên li jêr 60 cm, Xtalk dikare ji nîşana vegerî ya rastîn mezintir be. Ev yek xwendinek armancek derewîn dide an jî armanc ji ya rastî nêzîktir xuya dike. Hemî fonksiyonên kalibrasyona crosstalk di pêvekek Xtalk de (vebijarkî) tê de hene. Pêdivî ye ku bikarhêner bikar bîne file 'vl53l5cx_plugin_xtalk'.
The crosstalk dikare carekê were pîvandin, û data dikare were hilanîn da ku ew paşê were bikar anîn. Armancek li dûrek sabît, bi refleksek naskirî hewce ye. Dûrahiya hindiktirîn ku hewce dike 600 mm e, û armanc divê tevahiya FoV-ê bigire. Bi sazkirinê ve girêdayî, bikarhêner dikare mîhengan biguhezîne da ku kalîbrasyona crosstalk biguhezîne, wekî ku di tabloya jêrîn de tê pêşniyar kirin.
Mêz 1. Mîhengên berdest ji bo kalibrasyonê
| Setting | Min | Ji hêla STMicroelectronics ve hatî pêşniyar kirin | Max |
| Dûrahî [mm] | 600 | 600 | 3000 |
| Hejmara samples | 1 | 4 | 16 |
| Reflektîf [%] | 1 | 3 | 99 |
Not: Zêdekirina hejmara samples rastbûnê zêde dike, lê di heman demê de dema kalibrasyonê jî zêde dike. Dema ku bi hejmara samples xêz e, û nirx li dû dema nêzîkbûnê dişopînin:
- 1 sample ≈ 1 çirke
- 4 samples ≈ 2.5 seconds
- 16 samples ≈ 8.5 seconds
Kalibrasyon bi karanîna fonksiyona vl53l5cx_calibrate_xtalk () tête kirin. Ev fonksiyon dikare di her demê de were bikar anîn. Lêbelê, senzor divê pêşî were destpêkirin. Nîgara jêrîn herikîna kalibrasyona crosstalk nîşan dide.
Ranging herikîna
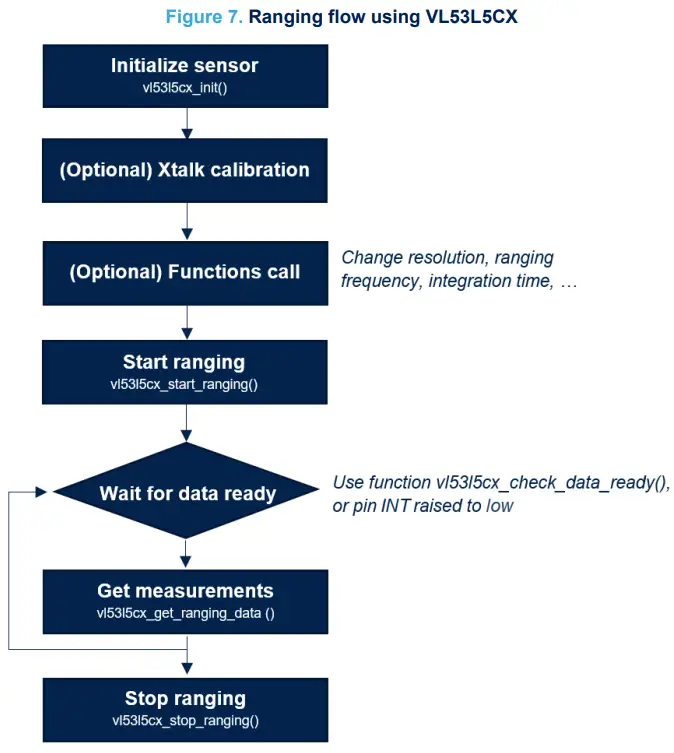
Nîgara jêrîn herikîna rêzê ya ku ji bo pîvandinê tê bikar anîn nîşan dide. Berî destpêkirina danişîna rêzê divê kalibrasyona Xtalk û bangên fonksiyona vebijarkî werin bikar anîn. Fonksiyonên bidestxistin/set di dema danişînek birêkûpêk de nayê bikar anîn, û bernameya 'li ser-firînê' nayê piştgirî kirin.
Taybetmendiyên berdest
VL53L5CX ULD API gelek fonksiyonan vedihewîne, ku destûrê dide bikarhêner ku li gorî doza karanîna senzorê xweş bike. Hemî fonksiyonên ku ji bo ajokerê hene di beşên jêrîn de têne diyar kirin.
Destpêkirin
Berî ku sensora VL53L5CX bikar bînin, pêdivî ye ku destpêkê were kirin. Ev operasyon ji bikarhêner hewce dike ku:
- Hêza senzorê (VDDIO, AVDD, pinên LPn li Bilind hatine danîn, û pin I2C_RST li 0 hatî danîn)
- Banga fonksiyona vl53l5cx_init (). Fonksiyon firmware (~ 84 Kbytes) li modulê kopî dike. Ev bi barkirina kodê li ser navbeynkariya I²C, û pêkanîna rûtînek bootkirinê ji bo temamkirina destpêkê pêk tê.
Rêveberiya resetkirina sensor
Ji bo sifirkirina cîhazê, pêdivî ye ku pêlên jêrîn werin guheztin:
- Pînên VDDIO, AVDD, û LPn pîneyên kêm bikin.
- 10 ms bisekinin.
- Pînên VDDIO, AVDD, û LPn Pînên bilind bikin.
Not: Veguheztina tenê pin I2C_RST pêwendiya I²C ji nû ve vedike.
Resolution
Çareserkirin bi hejmara herêmên berdest re têkildar e. Sensorê VL53L5CX du çareseriyên gengaz hene: 4 × 4 (16 herêm) û 8 × 8 (64 dever). Ji hêla xwerû ve sensor di 4×4 de bernamekirî ye.
Fonksiyona vl53l5cx_set_resolution() destûrê dide bikarhêner ku çareseriyê biguhezîne. Ji ber ku frekansa rêzê bi çareseriyê ve girêdayî ye, divê ev fonksiyon berî nûvekirina frekansa rêzê were bikar anîn. Wekî din, guheztina çareseriyê dema ku encam têne xwendin qebareya trafîkê ya li ser otobusa I²C jî zêde dike.
Ranging frequency
Frekansa rêjeyê dikare were bikar anîn da ku frekansa pîvandinê biguhezîne. Ji ber ku frekansa herî zêde di navbera çareseriyên 4×4 û 8×8 de cûda ye, pêdivî ye ku ev fonksiyon piştî hilbijartina çareseriyê were bikar anîn. Nirxên destûrî yên herî kêm û herî zêde di tabloya jêrîn de têne destnîşan kirin.
Mêz 2. Frekansên herî kêm û herî zêde
| Resolution | Rêjeya kêmîn [Hz] | Rêjeya frekansa herî zêde [Hz] |
| 4×4 | 1 | 60 |
| 8×8 | 1 | 15 |
Frekansa rêzê dikare bi karanîna fonksiyona vl53l5cx_set_ranging_frequency_hz() were nûve kirin. Bi xwerû, frekansa rêzê li 1 Hz tête danîn.
Moda rêzgirtinê
Moda rêzgirtinê dihêle ku bikarhêner di navbera performansa bilind an xerckirina hêza kêm de hilbijêrin. Du awayên pêşniyar hene:
- Berdewam: Amûr bi domdarî çarçoveyên bi frekansa ku ji hêla bikarhêner ve hatî destnîşan kirin digire. VCSEL di hemî rêgezê de çalak e, ji ber vê yekê dûrbûna herî zêde û bergiriya hawîrdorê çêtir e. Ev mod ji bo pîvandinên bilez an performansa bilind tê pêşniyar kirin.
- Xweser: Ev moda xwerû ye. Amûr bi domdarî çarçoveyên bi frekansa ku ji hêla bikarhêner ve hatî destnîşan kirin digire. VCSEL di heyamek ku ji hêla bikarhêner ve hatî destnîşankirin ve tête çalak kirin, bi karanîna fonksiyona vl53l5cx_set_integration_time_ms(). Ji ber ku VCSEL her gav ne çalak e, mezaxtina hêzê kêm dibe. Feydeyên bi frekansa rêzê ya kêmbûyî re eşkeretir in. Ev mod ji bo serîlêdanên hêza kêm tê pêşniyar kirin.
Moda rêzgirtinê dikare bi karanîna fonksiyona vl53l5cx_set_ranging_mode ().
Dema entegrasyonê
Dema entegrasyonê taybetmendiyek e ku tenê bi karanîna moda rêvegirtina xweser peyda dibe (binihêrin Beş 4.5: Moda Rêzkirinê). Ew destûrê dide bikarhêner ku dema ku VCSEL çalak e wextê biguhezîne. Ger moda rêzgirtinê li ser domdar were danîn guhertina dema entegrasyonê ti bandorek nake. Dema entegrasyonê ya xwerû li 5 ms hatiye danîn.
Bandora dema entegrasyonê ji bo çareseriyên 4×4 û 8×8 cûda ye. Çareserkirina 4×4 ji yek dema entegrasyonê, û çareseriya 8×8 ji çar demên entegrasyonê pêk tê. Hêjmarên jêrîn ji bo her du biryaran emîsyona VCSEL temsîl dikin.
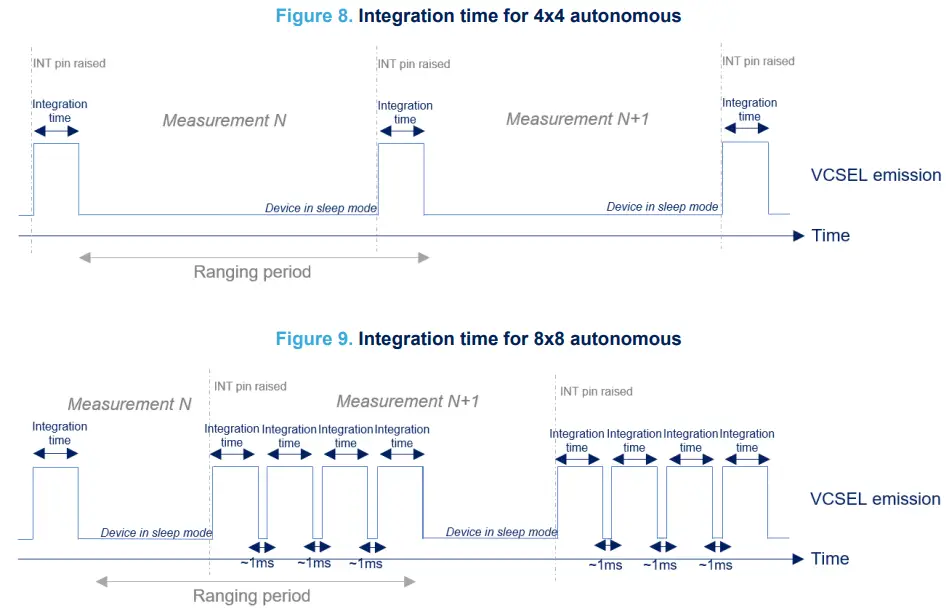
Berhevoka hemî demên entegrasyonê + 1 ms serma divê ji heyama pîvandinê kêmtir be. Wekî din, heyama rêzê bixweber zêde dibe.
Modên hêzê
Modên hêzê dikarin werin bikar anîn da ku dema ku amûr neyê bikar anîn xerckirina hêzê kêm bikin. VL53L5CX dikare di yek ji modên hêzê yên jêrîn de bixebite:
- Hişyarbûn: Amûr di HP-ya bêkar de (hêza bilind) hatî danîn, li benda rêwerzan e.
- Xew: Amûr di LP bêkar (hêza kêm), rewşa hêza kêm de tê danîn. Amûr nikare were bikar anîn heya ku di moda hişyarbûnê de were danîn.
Ev mod firmware û veavakirinê diparêze.
Moda hêzê dikare bi karanîna fonksiyona vl53l5cx_set_power_mode (). Moda xwerû şiyarbûn e.
Not: Ger bikarhêner bixwaze moda hêzê biguhezîne, pêdivî ye ku amûr ne di rewşek birêkûpêk de be.
Sharpener
Nîşana ku ji armancê vedigere ne nebza paqij a bi keviyên tûj e. Kevir dûr dikevin û dibe ku bandorê li dûrahiyên ku li deverên cîran hatine ragihandin bike. Tûjker ji bo rakirina hin an hemî nîşana ku ji ber ronahiyek perdeyê çêdibe tê bikar anîn.
The exampEw di jimareya jêrîn de tê xuyang kirin armancek nêzik a 100 mm ku navenda wê di FoV de ye, û armancek din, li paş 500 mm nîşan dide. Bi nirxa tûjker ve girêdayî, dibe ku armanca nêzîk ji ya rastîn li bêtir deveran xuya bibe.
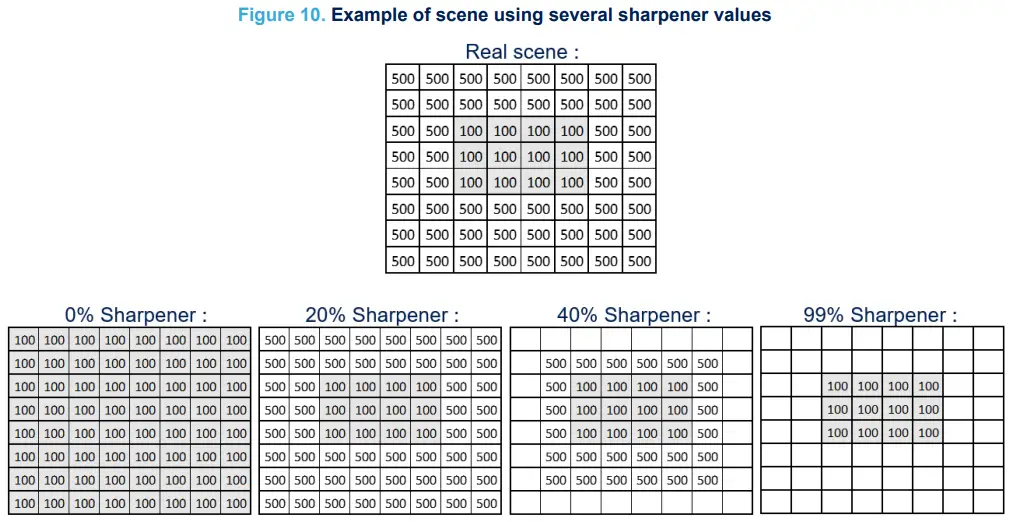
Sharpener dikare bi karanîna fonksiyona vl53l5cx_set_sharpener_percent (). Nirxên destûr di navbera 0% û 99% de ne. Nirxa xwerû %5 e.
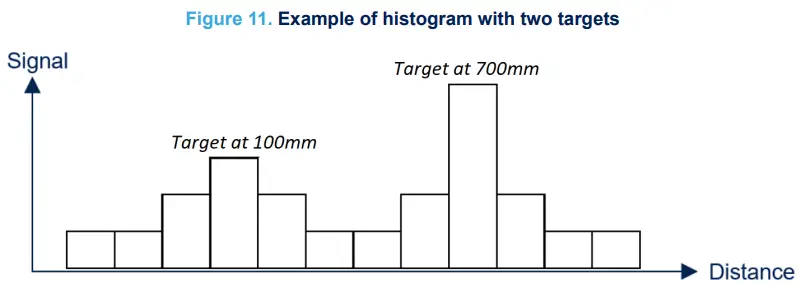
Fermana armancê
VL53L5CX dikare li her deverê çend hedefan bipîve. Bi saya pêvajoya histogramê, mêvandar dikare rêza armancên ragihandinê hilbijêrin. Du vebijark hene:
- Nêzîktirîn: Armanca herî nêzîk ya yekem e
- Hêztirîn: Hedefa herî bihêz ew yekem e ku hatî ragihandin
Rêza armanc dikare bi karanîna fonksiyona vl53l5cx_set_target_order () were guheztin. Rêza xwerû ya herî xurt e.
The example di jimareya jêrîn de tespîtkirina du hedefan nîşan dide. Yek li 100 mm bi reflekseke nizm, û yek jî li 700 mm bi refleksa bilind.
Li her deverê pir armanc
VL53L5CX dikare li her deverê çar hedefan bipîve. Bikarhêner dikare hejmara armancên ku ji hêla sensor ve hatî vegerandin mîheng bike.
Not: Dûrahiya herî kêm a di navbera du hedefên ku werin tespîtkirin de 600 mm e.
Hilbijartina ji ajokerê ne mumkin e; divê ew di 'Platform.h' de were kirin file. Pêdivî ye ku makro VL53L5CX_NB_ TARGET_PER_ZONE li ser nirxek di navbera 1 û 4-ê de were danîn. Rêza armancê ya ku di Beşa 4.9-ê de hatî diyar kirin: Rêzkirina armancê rasterast bandorê li rêza armanca ku hatî tespît kirin dike. Bi xwerû, senzor tenê herî zêde yek armanc ji her deverê derdixe.
Not: Hejmarek zêde ya hedefan li her deverê mezinahiya RAM-ê ya pêwîst zêde dike
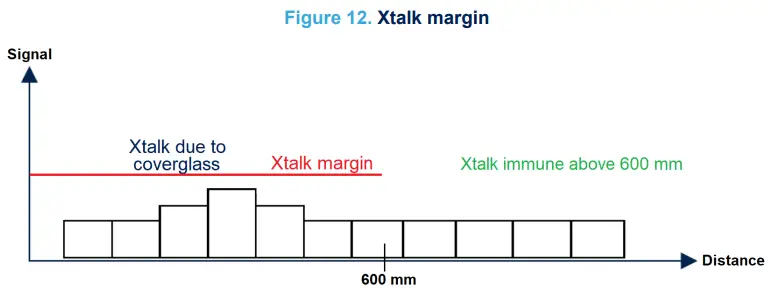
Xtalk margin
Marjîna Xtalk taybetmendiyek pêvek e ku tenê bi karanîna pêveka Xtalk ve tê peyda kirin. The .c û .f files 'vl53l5cx_plugin_xtalk' pêdivî ye ku were bikar anîn.
Dema ku şûşeyek sergirtî li jorê senzorê hebe, marjînal ji bo guheztina sînorê tespîtê tê bikar anîn. Rêz dikare were zêde kirin da ku piştî danîna daneyên kalibrasyona crosstalk-ê çu carî cam neyê dîtin. Ji bo exampLe, bikarhêner dikare kalibrasyonek crosstalk li ser yek amûrek yekane bimeşîne, û heman daneyên kalibrasyonê ji bo hemî amûrên din ji nû ve bikar bîne. Merjîna Xtalk dikare were bikar anîn da ku sererastkirina crosstalk bike. Nîgara jêrîn marjînala Xtalk nîşan dide.
Bendavên Detection
Digel kapasîteyên rêzê yên birêkûpêk, senzor dikare were bernamekirin da ku di binê hin pîvanên diyarkirî de tiştek bibîne. Ev taybetmendî bi karanîna pêveka "Beravên tespîtkirinê" peyda dibe, ku vebijarkek e ku ji hêla xwerû ve di API-yê de nayê nav kirin. Ew files bi navê 'vl53l5cx_plugin_detection_thresholds' pêdivî ye ku were bikar anîn.
Dema ku şert û mercên ku ji hêla bikarhêner ve hatine destnîşan kirin pêk werin, taybetmendî dikare were bikar anîn da ku qutiyek li ser pin A3 (INT) bide destpêkirin. Sê mîhengên gengaz hene:
- Çareserkirina 4×4: ji bo her deverê yek bendek bikar tîne (bi tevahî 16 bend)
- Çareserkirina 4×4: bikaranîna du berbendan li her deverê (bi tevahî 32 bend)
- Çareserkirina 8×8: ji bo her deverê yek bendek bikar tîne (bi tevahî 64 bend)
Veavakirina ku hatî bikar anîn çi be jî, prosedûra afirandina berbangê û mezinahiya RAM-ê yek in. Ji bo her kombînasyona sînor, çend zevî hewce ne ku bêne dagirtin: - Nasnameya Zone: id ya devera hilbijartî (binihêre Beş 2.2: Arasteya bi bandor)
- Pîvandin: Pîvana girtinê (dûr, nîşan, hejmara SPAD, ...)
- Tîp: pencereyên pîvandinê (di pencereyan de, ji pencereyan, li binê sînorê nizm, ...)
- Bendavê kêm: bikarhênerê bordûmana nizm ji bo tetikandinê. Bikarhêner ne hewce ye ku formatê saz bike, ew bixweber ji hêla API-ê ve tê rêve kirin.
- Rêjeya Bilind: Ji bo teşqelê bikarhênerek bordûmana bilind. Bikarhêner ne hewce ye ku formatê saz bike; ew bixweber ji hêla API-ê ve tê rêve kirin.
- Operasyona matematîkî: tenê ji bo 4 × 4 - 2 berhevokên sînoran li her deverê tê bikar anîn. Bikarhêner dikare di yek deverekê de bi karanîna çend bendeyan ve kombînasyona saz bike.
Nîşana tevgerê
Sensorê VL53L5CX xwedan taybetmendiyek firmware-ya pêvekirî ye ku destûrê dide tesbîtkirina tevgerê di dîmenek de. Nîşana tevgerê di navbera çarçoveyên rêzdar de tê hesibandin. Ev vebijêrk bi karanîna plugin'vl53l5cx_plugin_motion_indicator' heye.
Nîşana tevgerê bi karanîna fonksiyona vl53l5cx_motion_indicator_init () dest pê dike. Ji bo guheztina çareseriya senzorê, çareseriya nîşana tevgerê bi karanîna fonksiyona veqetandî nûve bikin: vl53l5cx_motion_indicator_set_resolution().
Di heman demê de bikarhêner dikare ji bo tespîtkirina tevgerê dûrahiya herî kêm û herî zêde biguhezîne. Cûdahiya di navbera dûrahiya herî kêm û herî zêde de nikare ji 1500 mm mezintir be. Bi xwerû, dûr bi nirxên di navbera 400 mm û 1500 mm de têne destpêkirin.
Encam di qada 'motion_indicator' de têne hilanîn. Di vê qadê de, rêzika 'tevger' nirxek ku li her deverê tundiya tevgerê vedihewîne dide. Nirxek bilind guheztina tevgera bilind a di navbera çarçeweyan de destnîşan dike. Tevgerek tîpîk nirxek di navbera 100 û 500 de dide. Ev hesas bi dema entegrasyonê, dûrbûna armanc û refleksa armancê ve girêdayî ye.
Kombînasyona îdeal a ji bo serîlêdanên hêza kêm karanîna nîşana tevgerê bi moda rêvegirtina xweser, û bendên tespîtê yên ku li ser tevgerê hatine bernamekirin e. Ev destûrê dide tesbîtkirina guhertinên tevgerê di FoV-ê de bi xerckirina hêza hindiktirîn.
Tezmînata germahiya periyodîk
Performansa rêzê ji hêla guherînên germahiyê ve tê bandor kirin. Sensorê VL53L5CX tezmînatek germahiyê vedihewîne ku gava ku weşan dest pê dike carekê tê pîvandin. Lêbelê, heke germahî pêşve bibe, dibe ku tezmînat bi germahiya nû re neyê hev kirin. Ji bo ku ji vê pirsgirêkê dûr nekevin, xerîdar dikare bi karanîna VHV-ya otomatîkî tezmînata germahiya demkî bimeşîne. Kalibrasyona germahiya periyodîk ji bo xebitandinê çend milî çirkeyan digire. Bikarhêner dikare heyamê diyar bike.
Ji bo karanîna vê taybetmendiyê, xerîdar pêdivî ye:
• Banga fonksiyona vl53l5cx_set_VHV_repeat_count().
• Dûv re, hejmara çarçoweyan di navbera her kalibrasyonek nû de wekî arguman bidin.
Ger arguman 0 be, tezmînat neçalak e.
Rêzkirina encamên
Daneyên berdest
Lîsteyek berfireh a daneyên armanc û hawîrdorê dibe ku di dema çalakiyên rêzdar de derkeve holê. Tabloya jêrîn pîvanên ku ji bikarhêner re peyda dibin diyar dike.
Mêz 3. Hilbera berdest bi karanîna sensor VL53L5CX
| Pêve | Nb bytes (RAM) | Yekbûn | Terîf |
| Ambient per SPAD | 256 | Kcps/SPAD | Pîvandina rêjeya hawîrdorê ku li ser rêza SPAD-ê hatî çêkirin, bêyî belavkirina fotonê çalak, ji bo pîvandina rêjeya nîşana hawîrdorê ya ji ber deng. |
| Hejmara hedefên hatine tespîtkirin | 64 | Netû | Hejmara hedefên hatine tespîtkirin li herêma heyî. Divê ev nirx ya yekem be ku kontrol bike da ku rastdariya pîvandinê nas bike. |
| Hejmara SPAD-ên çalak kirin | 256 | Netû | Hejmara SPAD-ên ku ji bo pîvana heyî hatine çalak kirin. Hedefek dûr an nizm a refleksîf bêtir SPAD-an çalak dike. |
| Signal per SPAD | 256 x nb armancên bernamekirî | Kcps/SPAD | Hejmara fotonên ku di dema pêlêdana VCSEL de têne pîvandin. |
| Range sigma | 128 x nb armancên bernamekirî | Mîlîmetre | Texmînkera Sigma ji bo dengê di dûrahiya armancê ya raporkirî de. |
| Dûrî | 128 x nb armancên bernamekirî | Mîlîmetre | Dûrahiya armancê |
| Rewşa armancê | 64 x nb armancên bernamekirî | Netû | Rastiya pîvandinê. Dîtin Beş 5.5: Encam jêfêhmî ji bo bêtir agahîya. |
| Reflectance | 64 x hedefên hejmar hatine bernamekirin | Ji sedî | Refleksiyona armancê ya texmînkirî ji sedî |
| Nîşana tevgerê | 140 | Netû | Struktura ku encamên nîşana tevgerê vedihewîne. Qada 'tevger' tundiya tevgerê dihewîne. |
Not: Ji bo çend hêmanan (sînyala per spad, sigma,…) gihandina daneyan cûda ye ger bikarhêner li her deverê ji yekê zêdetir armanc bername kiribe (binihêre Beş 4.10: Ji her deverê pir armanc). Binêre example kodên ji bo bêtir agahîya.
Hilbijartina encam xweş bikin
Bi xwerû, hemî derketinên VL53L5CX çalak in. Ger hewce be, bikarhêner dikare hin derketinên senzorê neçalak bike.
Neçalakkirina pîvandinê li ser ajokerê peyda nabe; divê ew di 'Platform.h' de were kirin file. Bikarhêner dikare makroyên jêrîn ragihîne da ku derketinan neçalak bike:
#define VL53L5CX_DISABLE_AMBIENT_PER_SPAD
#define VL53L5CX_DISABLE_NB_SPADS_ENABLED
#define VL53L5CX_DISABLE_NB_TARGET_DETECTED
#define VL53L5CX_DISABLE_SIGNAL_PER_SPAD
#define VL53L5CX_DISABLE_RANGE_SIGMA_MM
#define VL53L5CX_DISABLE_DISTANCE_MM
#define VL53L5CX_DISABLE_TARGET_STATUS
#define VL53L5CX_DISABLE_REFLECTANCE_PERCENT
#define VL53L5CX_DISABLE_MOTION_INDICATOR
Ji ber vê yekê, zevî di avahiya encamê de nayên ragihandin, û dane ji mêvandar re nayê veguheztin. Mezinahiya RAM û mezinahiya I²C kêm dibin.
Ji bo misogerkirina hevgirtina daneyan, ST her gav pêşniyar dike ku 'hejmara hedefên hatine tespîtkirin' û 'rewşa armancê' çalak bimînin. Ev pîvanan li gorî rewşa armancê fîlter dike (binihêre Beş 5.5: Şirovekirina Encaman).
Hilberîna encamên berbiçav
Di dema danişîna rêzgirtinê de, du rê hene ku hûn bizanin ka daneyên rêzê yên nû berdest in:
- Moda dengdanê: Bi domdarî fonksiyona vl53l5cx_check_data_ready() bikar tîne. Ew hejmartinek nû ya ku ji hêla sensor ve hatî vegerandin tespît dike.
- Moda qutbûnê: Li benda qutbûnê ye ku li ser pin A3 (GPIO1) hatî rakirin. Navbirî piştî ~ 100 μs bixweber tê paqij kirin.
Dema ku daneya nû amade ye, encam dikarin bi karanîna fonksiyona vl53l5cx_get_ranging_data() werin xwendin. Ew avahiyek nûvekirî vedigerîne ku hemî hilberên hilbijartî vedigire. Ji ber ku cîhaz asînkron e, ji bo domandina danişîna rêzê ti navber tune ku paqij bibe.
Ev taybetmendî hem ji bo modên rêzê yên domdar û hem jî xweser heye.
Bikaranîna formata firmware ya xav
Piştî veguheztina daneyên rêzê bi navgîniya I²C ve, di navbera forma firmware û formata mêvandar de veguheztinek heye. Ev operasyon bi gelemperî tête kirin ku ji bo ku bi mîlîmetreyan dûrbûnek wekî hilberek xwerû ya senzorê hebe. Ger bikarhêner bixwaze forma firmware bikar bîne, divê makroya jêrîn di platformê de were destnîşankirin file: VL53L5CX
#define VL53L5CX_USE_RAW_FORMAT
Şirovekirina encaman
Daneyên ku ji hêla VL53L5CX ve hatî vegerandin dikare were fîlter kirin da ku rewşa armancê were hesibandin. Statû rastbûna pîvandinê destnîşan dike. Lîsteya statuya tevahî di tabloya jêrîn de tête diyar kirin.
Mêz 4. Lîsteya statuya armanca berdest
| Rewşa armancê | Terîf |
| 0 | Daneyên rêzê nayên nûve kirin |
| 1 | Rêjeya sînyalê li ser array SPAD pir kêm |
| 2 | Qonaxa armancê |
| 3 | Texmînera sigma pir zêde ye |
| 4 | Lihevhatina armancê têk çû |
| 5 | Range derbasdar e |
| 6 | Li dora ku nayê çêkirin (bi gelemperî rêza yekem) |
| 7 | Lihevhatina rêjeyê têk çû |
| 8 | Rêjeya sînyalê ji bo armanca heyî pir kêm e |
| 9 | Rêjeya bi nebza mezin derbasdar e (dibe ku ji ber armancek hevgirtî be) |
| 10 | Rêze derbasdar e, lê di rêza berê de armanc nehat dîtin |
| 11 | Lihevhatina pîvandinê têk çû |
| 12 | Hedef ji hêla yekî din ve, ji ber tûjkerê, zer bûye |
| 13 | Armanc hate tespît kirin lê daneyên nehevgirtî. Pir caran ji bo armancên duyemîn diqewime. |
| 255 | Hedef nehate tespîtkirin (tenê heke hejmara hedefên hatine tespîtkirin çalak be) |
Ji bo ku daneyên domdar hebin, pêdivî ye ku bikarhêner statûya hedefa nederbasdar fîlter bike. Ji bo ku nirxek pêbaweriyê bidin, armancek bi statûya 5 wekî 100% derbasdar tê hesibandin. Rewşek 6 an 9 dikare bi nirxek pêbaweriya 50% were hesibandin. Hemî statûyên din di bin asta pêbaweriya 50% de ne.
Xeletiyên ajokerê
Dema ku xeletiyek bi karanîna sensora VL53L5CX çêbibe, ajoker xeletiyek taybetî vedigerîne. Tabloya jêrîn xeletiyên gengaz destnîşan dike.
Mêz 5. Lîsteya xeletiyên ku bi karanîna ajokerê têne peyda kirin
| Rewşa armancê | Terîf |
| 0 | No error |
|
127 |
Bikarhêner mîhengek nerast bername kir
(çareseriya nenas, frekansa rêzê pir zêde ye,…) |
| 255 | Çewtiya mezin. Bi gelemperî xeletiyek demjimêr, ji ber xeletiyek I²C. |
| yên din | Kombînasyona gelek xeletiyên ku li jor hatine destnîşan kirin |
Not: Mêvandar dikare bi karanîna platformê bêtir kodên xeletiyê bicîh bîne files.
Dîroka Revision
Mêz 6. Dîroka guhertoya belgeyê
| Rojek | Awa | Changes |
| 21-Jun-2021 | 1 | Serbestberdana destpêkê |
| 30-Aug-2021 | 2 | Zêde kirin Beş 5.4: Bikaranîna forma firmware ya xav
Rewşa hedefa nû 13 in Tablo 4. Lîsteya statuya armanca berdest |
| 05-Sep-2022 | 3 | Têbînî li ser kêmtirîn dûrahiya di navbera hedefan de zêde kir Beş 4.10: Li her deverê pir armanc |
| 10-Aug-2023 | 4 | Modified Wêne 11. Example ya histogram bi du hedefan |
| 21-Seb-2024 | 5 | VHV zêde kir (volga pir bilindtage) ber Beş 1: Kurtenivîs û kurtenivîs. Zêde kirin Beş 4.14: Tezmînata germahiya demkî |
BİXWÎNE BİXWÎNE - BİXWÎNE BİXWÎNE
STMicroelectronics NV û şaxên wê ("ST") mafê ku di her kêliyê de bêyî agahdarî li ser hilberên ST-ê û / an jî vê belgeyê biguhezînin, rastkirin, çêtirkirin, guheztin û çêtirkirinan diparêzin. Pêdivî ye ku kirrûbir berî ku fermanan bidin agahdariya herî dawî ya têkildar li ser hilberên ST bistînin. Berhemên ST di dema pejirandina fermanê de li gorî şert û mercên firotanê yên ST têne firotin.
Kiryar bi tenê ji bijartin, hilbijartin û karanîna hilberên ST berpirsiyar in û ST ji bo arîkariya serîlêdanê an sêwirana hilberên kirrûbiran berpirsiyarî nagire.
Li vir ji hêla ST ve ti destûrek, eşkere an jî têgihîştî, ji tu mafek milkê rewşenbîrî re nayê dayîn.
Ji nû ve firotina hilberên ST bi şertên ku ji agahdariya ku li vir hatî destnîşan kirin cûdatir dê garantiyek ku ST ji bo hilberek weha hatî dayîn betal bike.
ST û logoya ST marqeyên ST ne. Ji bo bêtir agahdarî li ser marqeyên ST, serî li www.st.com/trademarks. Hemî navên hilber an karûbarê din milkê xwediyên wan ên têkildar in.
Agahdariya di vê belgeyê de agahdariya ku berê di guhertoyên berê yên vê belgeyê de hatine peyda kirin digire û diguhezîne.
© 2024 STMicroelectronics - Hemî maf parastî ne

Belge / Çavkanî
 |
STMicroelectronics VL53L5CX Sensorê Demjimêra Rêjeya Rêjeya Firînê ya Multizone [pdf] Rêbernameya Bikarhêner VL53L5CX Sensora Dema Rêjeya Firînê ya Pirzone, VL53L5CX, Sensorê Dema Rêjeya Rêjeyê ya Pirzone, Sensorê Rêzgirtina Dema Firînê, Sensorê Rêzgirtina Firînê, Sensorê Rêzê, Sensor |



